The PID constant values and combinations that are used for temperature control depend on the characteristics of the controlled object. A variety of conventional methods that are used to obtain these PID constants have been suggested and implemented based on actual control temperature waveforms. Auto-tuning methods make it possible to obtain PID constants suitable to a variety of controlling objects. One typical method is the limit cycle method.
ON/OFF control begins from start point A in this method. Then obtain the PID constants from the hunting cycle T and oscillation D.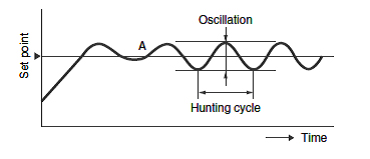
Readjusting PID Constants
PID constants calculated in auto-tuning operation normally do not cause problems except for some particular applications. In those cases, refer to the following diagrams to readjust the constants.
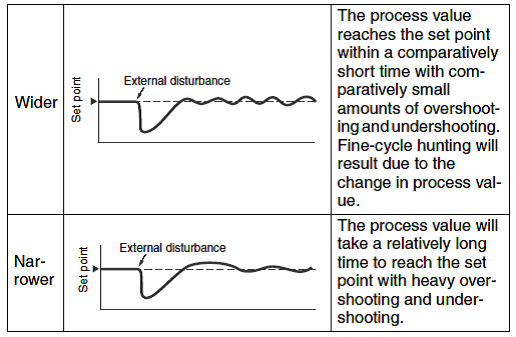
(1) Response to Change in the Proportional Band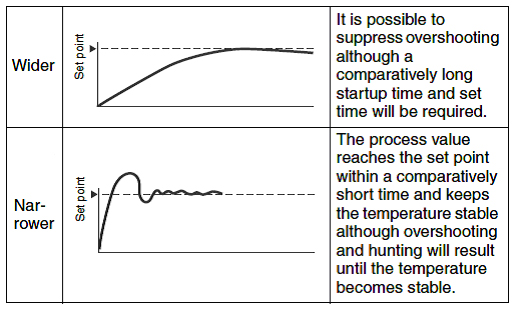 (2) Response to Change in Integral Time
(2) Response to Change in Integral Time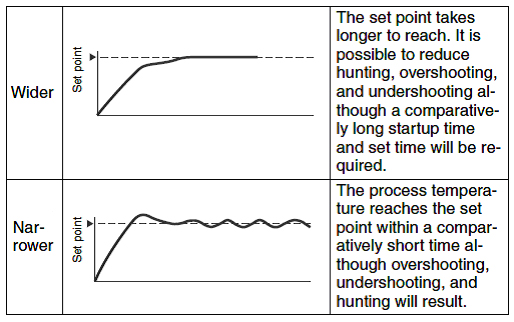 (3) Response to Change in Derivative Time
(3) Response to Change in Derivative Time